


이번주 AI 뉴스 📰

중국, '글로벌 AI 협력 기구' 창설 제안…미국 견제 나서
AI 기구 제안 : 중국이 상하이 세계인공지능대회에서 AI 기술의 글로벌 협력을 위한 국제기구 창설을 제안했음.
미국 영향력 견제 : 이는 AI 기술을 소수 국가가 독점하는 것을 비판하며 미국의 기술 패권에 대한 대안을 제시하려는 의도임.
개방·공유 강조 : 특히 '글로벌 사우스' 국가들과 AI 개발 경험을 공유하고 개방적인 글로벌 거버넌스 구축을 촉구함.

테슬라, 차세대 AI칩 'AI6' 생산 파트너로 삼성전자 낙점
22조원 규모 계약 : 테슬라가 차세대 'AI6' 칩 생산을 위해 삼성전자와 165억 달러(약 22조 원) 규모의 계약을 체결했음.
AI칩의 핵심용도 : 이 칩은 완전자율주행(FSD), 휴머노이드 로봇, 데이터센터까지 모두 활용될 핵심 부품임.
머스크 직접 관리 : 머스크가 텍사스 공장의 생산 효율을 직접 챙기겠다고 밝히며 계약의 중요성을 강조했음.

Claude Code 과다 사용 막는다…새로운 주간 이용량 제한 도입
주간 이용량 제한 : 앤스로픽이 AI '클로드'의 유료 구독자를 대상으로 8월 28일부터 새로운 주간 단위 사용량 제한을 도입함.
과다사용자 제재 : 24시간 AI 코딩툴을 가동하는 소수 이용자와 계정 재판매를 막아 서비스 안정을 꾀하기 위한 조치임.
AI 업계의 고민 : 폭발적인 수요 대비 부족한 컴퓨팅 자원 문제로, 다른 AI 코딩툴 업체들도 유사한 정책을 도입하고 있음.
이번주 AI 논문 📝
그룹 시퀀스 정책 최적화 (Group Sequence Policy Optimization)
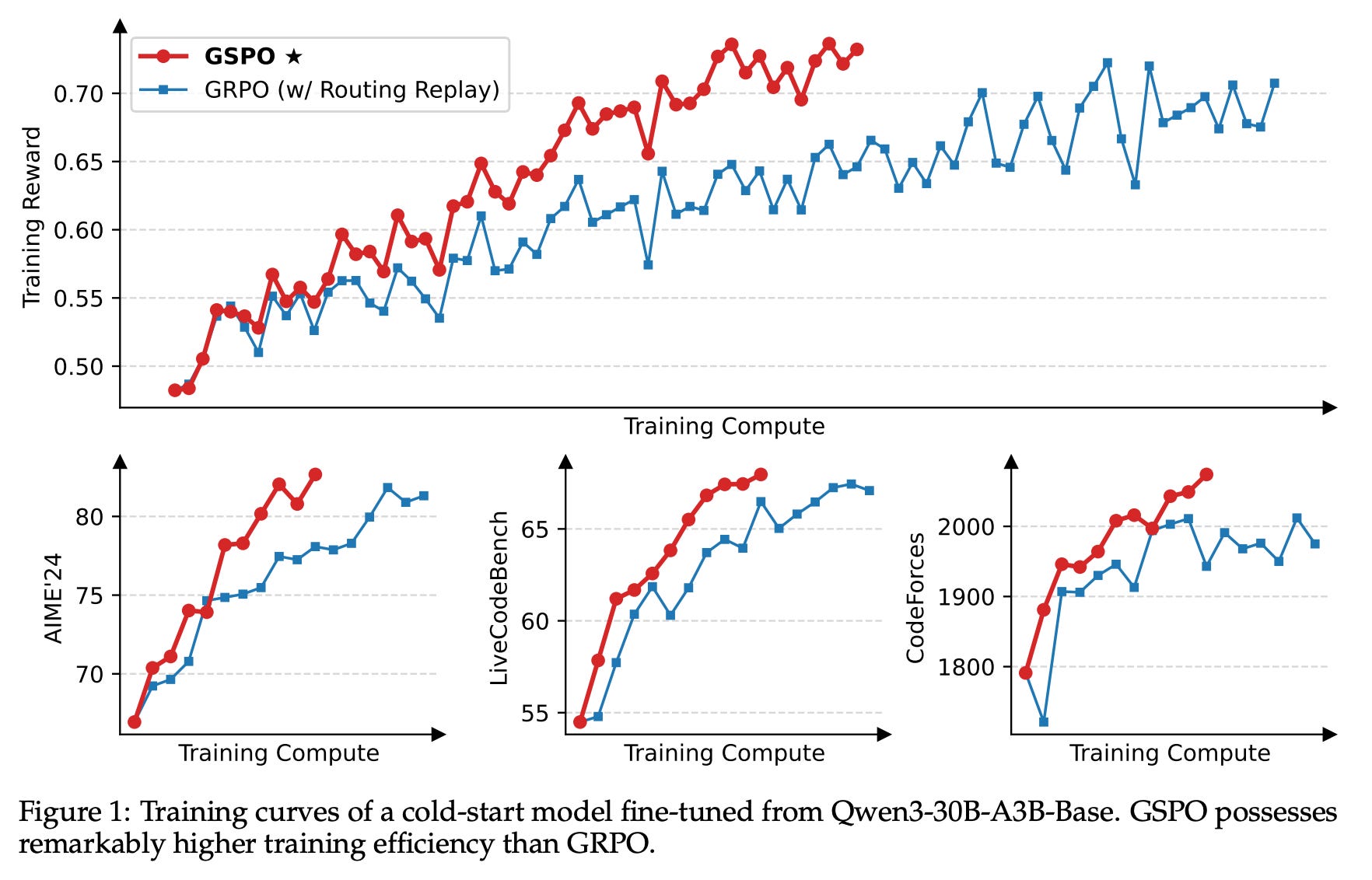
새로운 RL 알고리즘 : 대규모 언어 모델(LLM) 훈련을 위한 안정적이고 효율적인 강화학습 알고리즘 'GSPO'를 소개함. 토큰 단위가 아닌 시퀀스(문장) 단위의 가능성을 기반으로 최적화를 수행하는 것이 특징임.
효율성 및 안정성 : 기존 알고리즘(GRPO) 대비 뛰어난 훈련 효율과 성능을 보이며, 특히 전문가 혼합(MoE) 모델의 강화학습 과정을 안정시키는 데 효과적임.
실제 모델에 적용 : GSPO의 이러한 장점들은 최신 'Qwen3' 모델의 성능을 눈에 띄게 향상시키는 데 직접적으로 기여했음.
컨텍스트 한계를 넘어서: 장기 추론을 위한 잠재의식 스레드
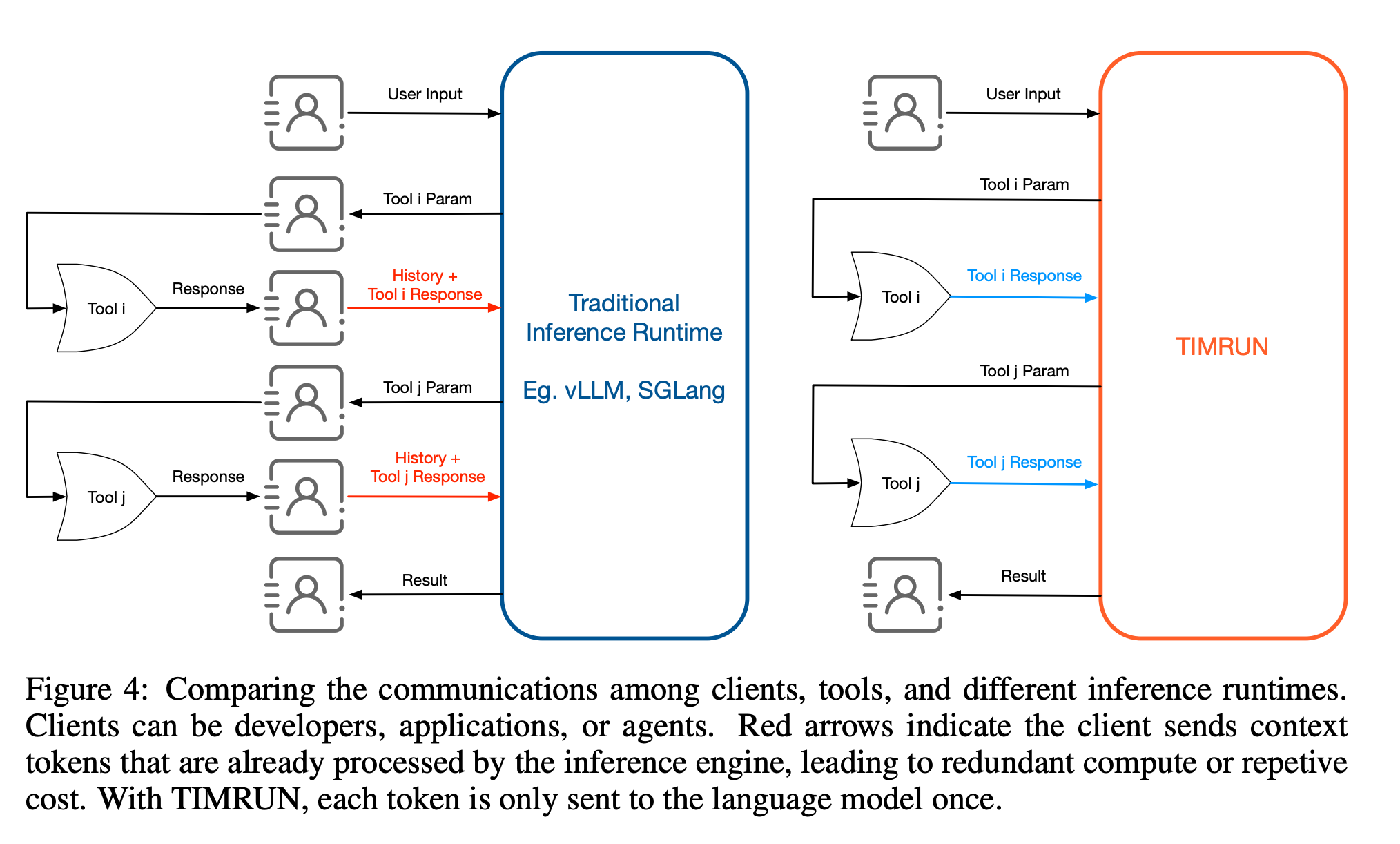
컨텍스트 한계 극복 : LLM의 컨텍스트(문맥) 길이 제한에 따른 추론 정확도 및 효율성 저하 문제를 해결하기 위해, 재귀적 문제 해결 모델 'TIM'과 추론 런타임 'TIMRUN'을 제안함.
추론 트리와 메모리 : 언어를 선형적 시퀀스가 아닌 '추론 트리' 구조로 모델링하고, 가장 관련성 높은 정보만 작업 메모리에 유지하여 GPU 메모리와 위치 임베딩의 재사용을 극대화함.
높은 성능과 정확도 : 실험 결과, 시스템은 높은 추론 처리량을 유지했으며 긴 추론과 다단계 도구 사용이 필요한 수학, 정보 검색 과제에서 높은 정확도를 달성함.
인간처럼 보기: MLLM의 시각 인식 한계와 튜링 눈 테스트
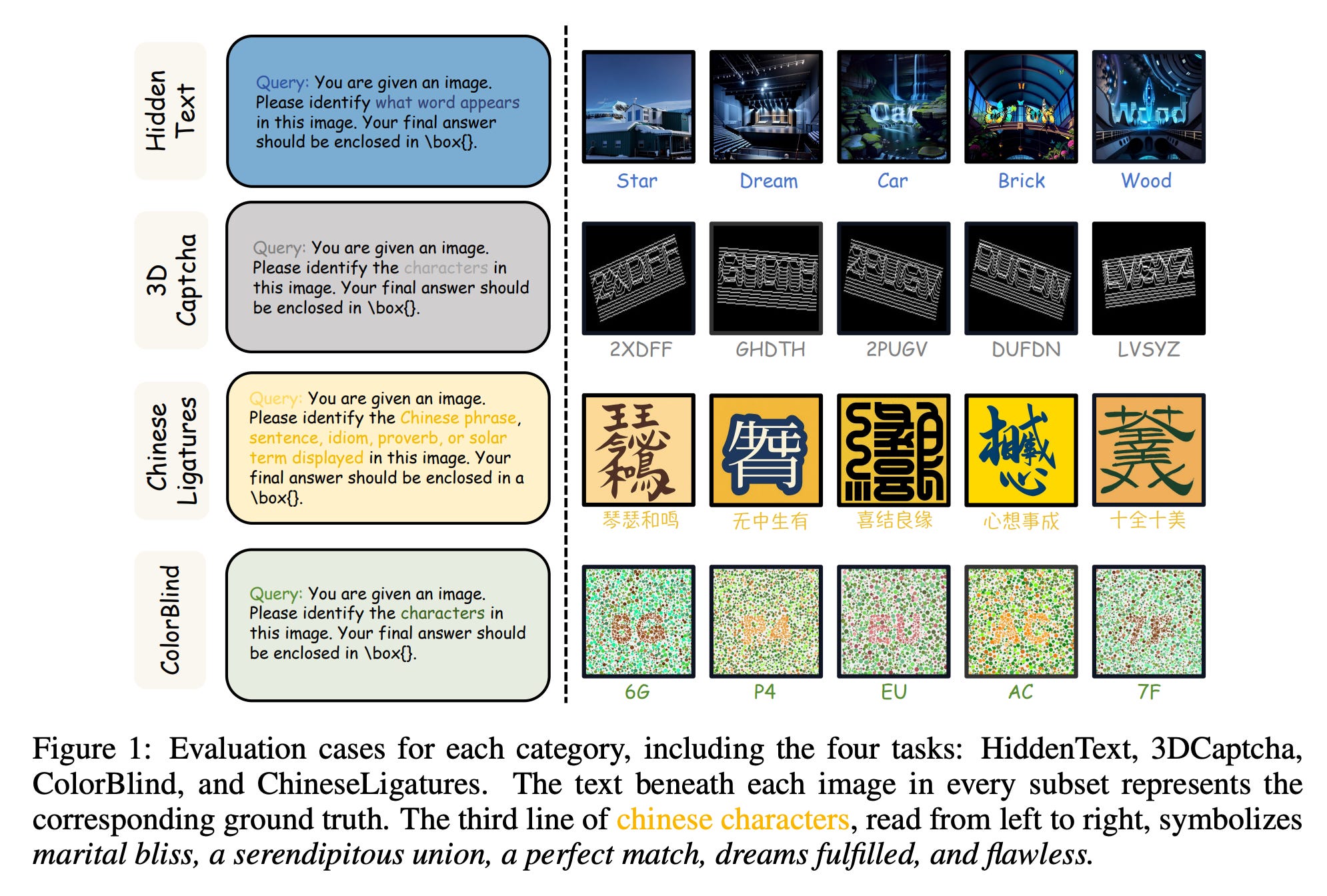
인식 능력에 주목 : MLLM 연구의 초점을 추론에서 '인식'으로 전환하고, '모델이 인간처럼 세상을 보는가?'라는 질문에 답하기 위해 새로운 인식 중심 벤치마크 '튜링 눈 테스트(TET)'를 제안함.
예상 밖의 실패 : 실험 결과, 최신 MLLM들은 인간에게는 매우 직관적이고 간단한 TET의 시각적 과제들에서 심각한 오류(catastrophic failure)를 보이며 큰 한계를 드러냄.
비전 능력의 한계 : 이러한 실패는 언어 모델의 추론이 아닌 '비전 타워'의 일반화 능력 부족이 핵심 원인임을 밝혀냄. 이는 현 MLLM과 인간 시각 인식 사이의 근본적인 격차를 시사함.
이번주 AI 프로덕트 🎁

모델 아키텍처 발견의 알파고 모멘트: AI에 의한 자율적 연구
AI 연구하는 AI : 인간의 인지 능력에 의존하는 기존 AI 연구의 한계를 극복하고자, AI가 스스로 신경망 아키텍처를 연구하고 혁신하는 완전 자율 시스템 'ASI-ARCH'가 개발됨.
인간 뛰어넘는 발견 : 2만 GPU 시간 동안 1,773건의 자율 실험을 통해, 인간이 설계한 기준을 뛰어넘는 106개의 혁신적인 최첨단 아키텍처를 발견함.
연구의 계산화 : 본 연구는 과학적 발견이 인간이 아닌 계산 능력으로 확장될 수 있음을 증명했으며, 관련 프레임워크 전체를 오픈소스로 공개함.

동적 세계 생성 모델 : 이미지, 텍스트 등을 기반으로 사용자가 탐험하고 제어할 수 있는 동적 세계를 만드는 것을 목표로 하는 '유메(Yume)' 모델을 소개함. 현재 버전은 단일 이미지로 키보드 탐험이 가능한 세계를 생성함.
핵심 프레임워크 : 안정적인 제어를 위한 카메라 모션 양자화, 무한 영상 생성을 위한 MVDT 아키텍처, 고품질 샘플러 및 모델 가속 기술을 포함하는 독자적인 프레임워크를 도입함.
결과 및 오픈소스 : 고품질 데이터셋으로 훈련하여 다양한 장면에서 뛰어난 결과를 달성했으며, 모든 데이터와 코드, 모델 가중치는 오픈소스로 공개됨.








